








ひょうじきけんしゅつのげんり
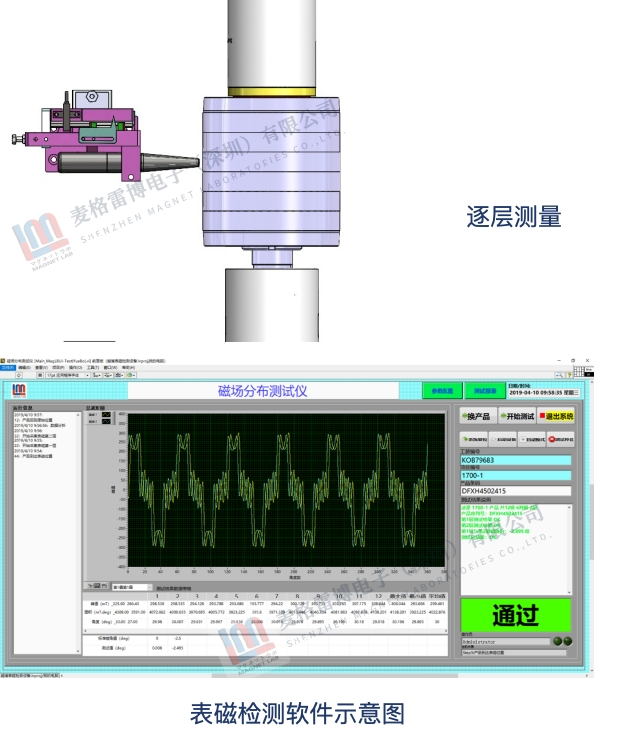
多軸モジュールを通じてテスラプローブを指定位置に移動し、モータを通じて被測定ロータを駆動して定速円周運動を行い、テスラプローブが測定したロータ表面磁場をテスラ計デジタル化処理を通じてコンピュータに転送し、コンピュータ専用磁気検出ソフトは磁気検出データと回転角度を1対1で36000点/360°に対応させ、ロータが指定した高さの全周の磁気分布を走査した後、テスラプローブを次の層の指定位置に移動して繰り返し測定し、すべて完了し、磁気分布ソフトウェアを通じてデータの処理、および指定パラメータ(磁極ピーク、磁極面積、磁極角度)に設定した上下限を比較測定報告を生成し、検出結果がOKまたはNG信号を出力すると判断し、2 D波形表示として検出し、1次元ホールプローブを採用する。
")
表磁気検出ソフトウェア
")
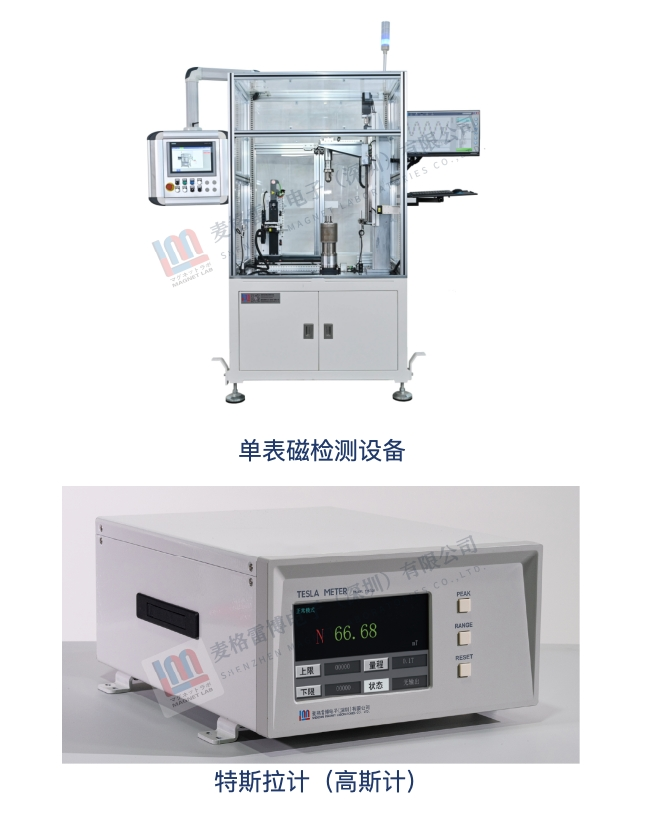
表磁気検出装置
")